
Inzwischen habe ich einen "3D-Editor" (s. hier)
mit dem ich wesentlich mehr Punkte im Raum definieren kann.
Dabei haben sich Punkte als leichter zu handhaben
herausgestellt als die "Nadeln" (Punkt + Normalenvektor) mit
denen ich die Bezier-Flächen definiert habe. Daher habe
ich nach einem Algorithmus für diese Anforderungen
gesucht:
Im Folgenden versuche ich die Grundlagen zu vermitteln,
soweit ich diese benötigt habe. Dies ist aber keine
allgemeine Einführung in B-Splines oder sonstige
Freiflächen!
| ( |
P.x |
) |
( | w · P.x |
) | ||
| w
· P = w · |
P.y |
= |
w · P.y | ||||
| P.z |
w · P.z |
Für die Addition zweier Vektoren gilt, dass die
jeweils entsprechenden Komponenten addiert werden:
| ( |
P1.x + P2.x | ) |
|
| P1 + P2 = |
P1.y + P2.y | ||
| P1.z + P2.z |
Lässt man die Bedingung dass w1 aus [0..1]
stammen muss weg, erhält man alle Punkte auf der Geraden durch P1
und P2 (also nicht nur die zwischen P1
und P2), aber das nur am Rande.
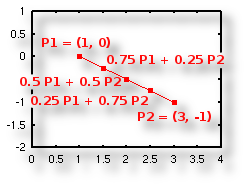
Die Position auf der Geraden zwischen P1 und P2
bezeichnen wir mit f, wobei f im Intervall [0...1]
liegt und f=0 den Anfang der Geraden und f=1 das Ende der
Geraden bezeichnet. Damit ist w1(f) = 1 - f und w2(f)
= f.
Nehmen wir nun weitere Punkte und Gewichte hinzu:
P = w1(f) · P1 + w2(f) · P2 + w3(f) · P3 + w4(f) · P4 + ... + wN(f) · PN
Dabei ist nun aus dem Intervall [1...N] und f=1 bezeichnet
den Anfang und f=N das Ende der Geraden1). Die zu den
Kontrollpunkten P1...PN
gehörenden Gewichte w1...wN
hängen dann wie folgt von f ab:
wi(f) = max(0, 1 - |f - i|)
Damit bekommt man eine Stückweise lineare Verbindung
der Punkte P1...PN. Man beachte auch
dass die Summe aller Gewichte immer gleich 1 ist:
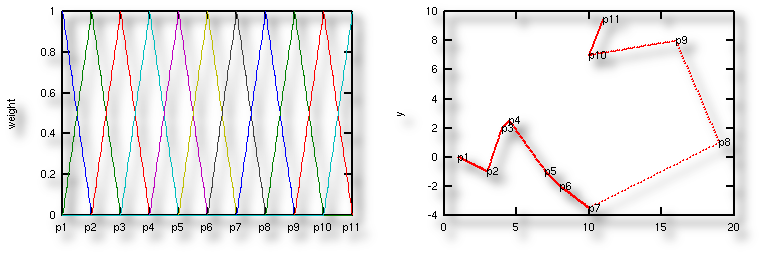
An einer Stelle f der Kurve sind jeweils max. zwei Gewichte
ungleich 0 (ist f genau 1, 2, 3, 4, ... oder N, dann ist nur
genau ein Gewicht ungleich 0 - nämlich "wf").
Um nun eine "runde" Verbindung zu erhalten muss man die
Gewichte anders definieren. Insbesondere sollen mehr als
max. zwei Gewichte ungleich 0 sein können. Das
heißt an einer Stelle f wirken sich mehr als nur zwei
Punkte Pk und Pk+1 aus (wobei k hier
dem auf die nächste Ganzzahl abgerundetem f
entspricht). Die Summe aller Gewichte soll zwar weiterhin
stets gleich 1 sein, jedoch kann man das jeweils durch
Normierung erreichen:
wi(f) = wi(f)' / ∑ w1(f)...wN(f)
Man kann also Gewichte wi' ... wN'
erstmal "unbeeindruckt" von dieser Bedingung (1) bestimmen.
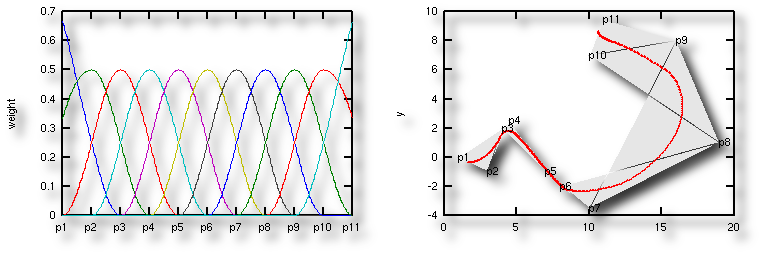
Der lineare Ansatz, die Bereiche in denen ein Gewicht
ungleich 0 ist einfach um den Faktor 2 zu strecken hat sich
also nicht so zielführend erwiesen:
wi(f) = max(0, 1 - |f - i| / 2)
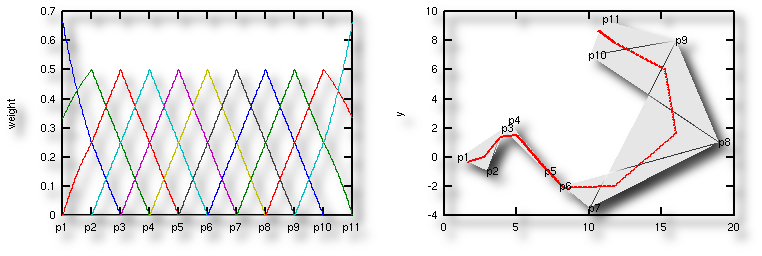
Die Kurve bleibt innerhalb der konvexen Hülle (grau
dargestellt)2). Rund ist die
Verbindung aber leider nicht. Warum? Einfach
ausgedrückt: die Kombination linearer Funktionen bleibt
immer linear.
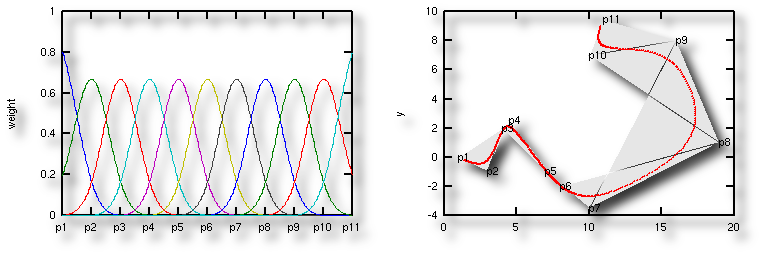
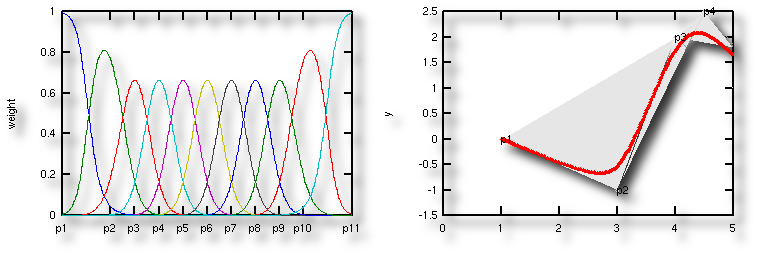
Schon besser funktioniert Folgendes:
wi(f) = cos(max(-2, min(2, f -
i)) * pi / 2) + 1

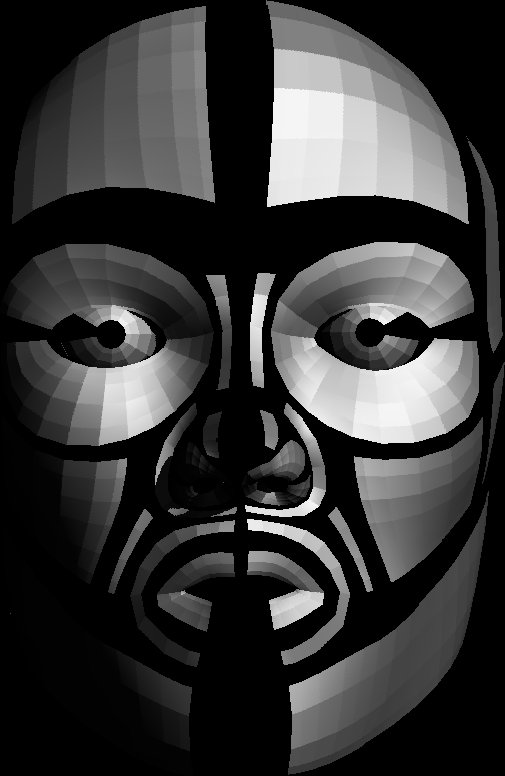
"Maske I"
Zusammenfügen der einzelnen Segmente funktioniert noch nicht. Einige Flächen haben überhaupt noch nicht funktioniert. Und das alles, obwohl die Flächen noch nichtmal "rund" sind. |
"Maske II"
...viel besser ist es noch nicht geworden... |
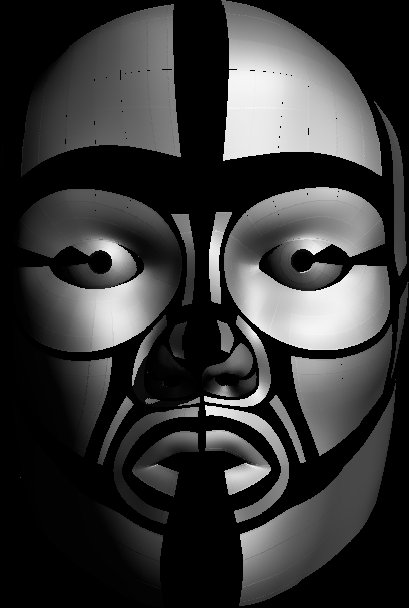
"Maske III"
...immer noch nicht deutlich besser aber immerhin die Augen zeigen sich schonmal... |
|
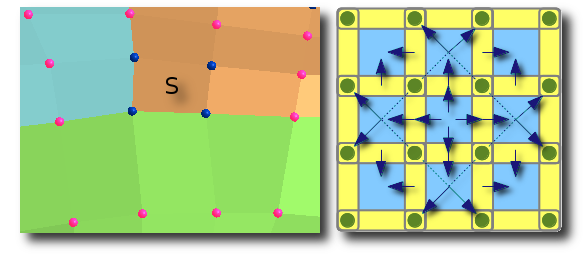
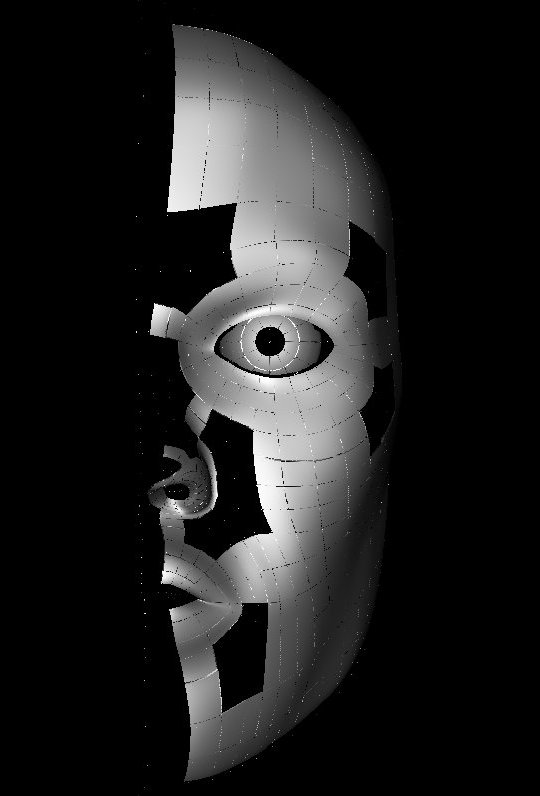
"Ecki I"
Gut, alles da, noch nicht richtig verbunden, und vor allem noch eckig ("eckig" ist viel einfacher, weil man für jedes Segment nur die 4 (2x2) direkt angrenzenden Kontrollpunkte zu berücksichtigen braucht; für runde Flächen muss man dagegen eine größere Nachbarschaft heranziehen und das wiederum bedeutet, dass sich die "Einflussgebiete" überlappen) |
||
| "Maske I" |
|
"Maske II" |
|
"Maske III" | "Ecki I" | |

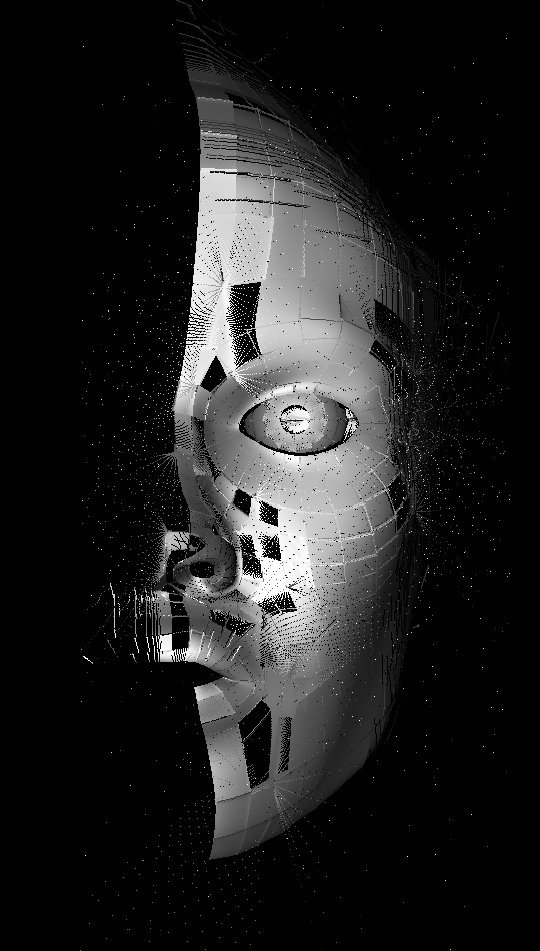
"Ghost I"
Erster versuch die Flächen rund zu bekommen. Dafür werden für jedes Segment nicht mehr nur die vier direkt beteiligten Kontrollpunkte mit in die Berechnung einbezogen, sondern ein Raster aus 4x4 Kontrollpunkten um das jeweilige Segment (diese Raster überlappen sich also für benachbarte Segmente). Hier ist das natürlich noch grandios gescheitert... |
"Ghost II"
Die Flächen sind etwas größer geworden, dafür ist dem Ärmsten aber auch die Nase explodiert - also kein echter Fortschritt... |

"Surreal I"
...also nochmal ein kleiner Test mit eckigen Segmenten (war schonmal besser :-)... |
"Segmentist I"
...ok wir nähern uns langsam wieder... |
|||
| "Ghost I" | "Ghost II" | "Surreal I" | "Segmentist I" | |||
"Segmentist II"
...das klappt nun auch in rund, nur will da noch nicht so richtig zusammen was zusammen gehört... |
"Segmentist III"
...die Abstände zwischen den Flächen sind geschrumpft, aber das prinzipielle Problem die Flächen zu verbinden ist noch nicht gelöst: An den Randsegmenten jeder Fläche müssen Kontrollpunkte aus benachbarten Flächen berücksichtigt werden, Die Kontrollpunktmatrizen angrenzender Flächen können aber beliebig anders orientiert sein... |

"Grinzwanzliger Grunzwanzl"
..."kleine" Rückschläge gibt's immer wieder... |
"Pesti"
...verbunden, aber nicht mehr glatt... |
|||
| "Segmentist II" | "Segmentist III" | "Grinzwanzliger Grunzwanzl" | "Pesti" | |||

"Spiderman"
...verbuchen wir es als weiteren kleinen Rückschlag (aber nett aussehen tut's immerhin)... |
"Checkerman I"
...und wieder nähern wir uns... |
"Checkerman II"
...kein Kommentar... |
"Android"
Hm, das hier scheint doch in die richtige Richtung zu gehen... |
|||
| "Spiderman" | "Checkerman I" | "Checkerman II" | "Android" | |||
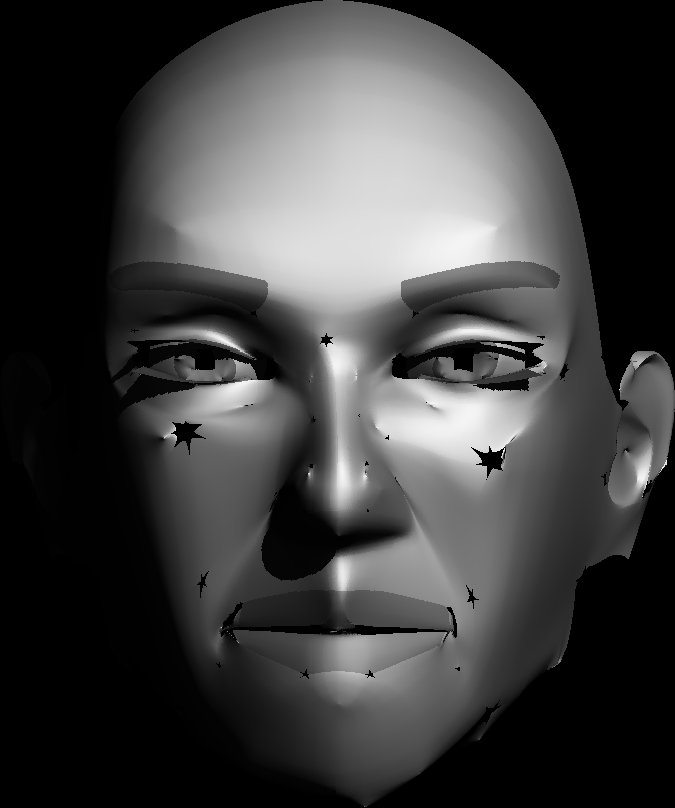
"A star is born"
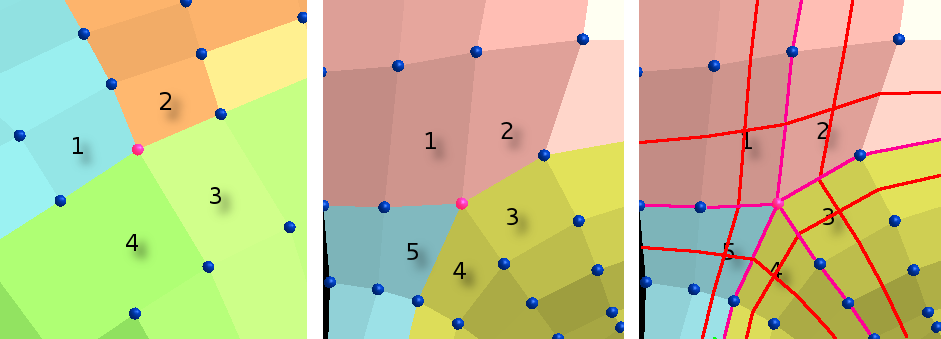
Das hier ist erstmal die Lösung dafür mehrere Flächen, die jeweils durch eine Matrix aus Kontrollpunkten definiert sind glatt miteinander zu verbinden. Was nun aber zu Tage tritt ist das - wie sich herausstellen sollte - alles andere als triviale Problem der "irregulären" Punkte. Das sind Punkte die Teil von mehr als vier Segmenten sind (was nur an den Schnittstellen von mind. drei einzelnen Flächen vorkommen kann. |
"Franz"
...nun kommt eine ganze Reihe von Versuchen die Flächen auch an den irregulären Punkten sauber zu verbinden. Das hier kann man schonmal getrost als gescheitert bezeichnen... |
"Mr. trampolin man"
...ja gut, die "irregulären Punkte sind genauso (un-)sauber verbunden wie alle anderen auch, aber das war ja so nicht gewollt. Ich hatte versucht die Punkte nur anhand ihre Entfernung zu gewichten jedoch die Information über Spalten und Zeilen der Kontrollpunktematrizen zu vernachlässigen. |
"Zausel"
...wie war das doch noch gleich mit den Rückschlägen?... |
|||
| "A star is born" | "Franz" | "Mr trampolin man" | "Zausel" | |||
"Terminator"
Naja hier fehlen nun einfach alle Segmente, die an "irregulären" Punkten liegen. |

"Ami"
Da wo ursprünglich sternförmige Löcher waren sind nun sternförmige Flächen mit Löchern drumrum. Ich habe hier versucht die Flächen zu den Löchern hinzuziehen (dehnen). Abgesehen, davon dass das hier natürlich noch Mist ist, hat sich der ganze Ansatz als Irrweg entpuppt... |
"Noname"
Derselbe Ansatz wie eben, etwas besser ausgeführt. Was man neben den Löchern auch schon erahnen kann ist das eigentliche Problem dieser Idee: die strahlenförmig von "irregulären" Punkten nach außen gehenden Kanten (jeweils über ein Segment) lassen sich so nicht vermeiden. |
"Schrotti"
...Probleme? Ich?... |
|||
| "Terminator" | "Ami" | "Noname" | "Schrotti" | |||

"Gewebe"
Die Phase des hilflosen Rumprobierens... |

"Knitterig"
Nochmal der Versuch Kontrollpunkte nur anhand ihre Entfernung zu gewichten, jedoch nicht nach ihrer Zeilen-/Spalten-Position in der Matrix aus Kontrollpunkten einer Fläche. |
"Oval"
Das hier verdeutlicht das Problem: diese Bereiche sind relativ glatt, jedoch klappt die Verbindung an den Kanten nicht (wie im vorigen Bild zu sehen). |

"Aalglatt"
Statt das Problem zu beseitigen habe ich mich entschlossen es so klein zu machen, dass man es nicht mehr sieht - und zwar so: Es werden zusätzliche Kontrollpunkte eingefügt, so dass die Löcher um die "irregulären" Punkte so klein werden, dass man sie nicht mehr sieht. Dazu unterteile ich hier alle Segmente rekursiv mehrfach in 2x2 kleinere Segmente. Da ich diese neuen Kontrollpunkte gewinne, indem ich Punkte auf der (virtuellen) Oberfläche bestimme, die aus den Kontrollpunkten zum jeweils letzten Level resultiert, passiert Folgendes: Die Gesamtfläche "schrumpft" und wird glatter als gewünscht. Prinzipiell ist der Ansatz aber dennoch vielversprechend... |
|||
| "Gewebe" | "Knitterig" | "Oval" | "Aalglatt" | |||

"Krieger I"
...Wenn man alle Segmente aller Flächen soweit unterteilt, dass keine Löcher mehr sichtbar sind, dann bekommt man verdammt viele Segmente (Kontrollpunkte). Man könnte ja stattdessen nur die Segmente weiter unterteilen, die entlang der Kanten liegen, die von den "irregulären" Punkten ausgehen. Das hier ist der Versuch diese Segmente wenigstens erstmal zu finden und rot zu markieren, was aber noch nicht richtig funktioniert hat... |
"Krieger II"
...ok Finden klappt; weiter unterteilen noch nicht wirklich... |
"Android II"
Hier wurden alle Segmente zur besseren Unterscheidung zufällig eingefärbt. Das Unterteilen (nur) der notwendigen Segmente funktioniert aber noch nicht korrekt (es werden teilweise die falschen Segmente bzw., die richtigen Segmente, aber in der falschen Richtung (horizontal/vertikal) unterteilt, was dazu führt, dass sie ihre Nachbarsegmente nicht finden, weil es einfach keine größenmäßig passenden Nachbarsegmente mehr gibt... |
"Faltig"
Soweit klappt die Unterteilung nun. Das Problem ist aber, dass die Flächen an den Stellen, wo zusätzliche Kontrollpunkte eingefügt werden anders schrumpfen als in den anderen Bereichen, wodurch Einkerbungen ("Falten") entstehen... |
|||
| "Krieger I" | "Krieger II" | "Android II" | "Faltig" | |||
"Kunterbunt"
Diese Debug-Ausgabe mit zufällig eingefärbten Segmenten verdeutlicht nochmal die Unterteilung entlang bestimmter Segmentgrenzen (zu erkennen an den dort deutlich schmäleren Segmenten). |
"Alt"
...und hier sehen wir schön wie man das Problem mit den Falten nicht löst... schlimmer geht's nicht? ... |
"Schrumpelig"
...ohhh doch! |

"Hartschale"
...immerhin: die Kanten sind kleiner geworden und der Rest ist rund... |
|||
| "Kunterbunt" | "Alt" | "Schrumpelig" | "Hartschale" |
|||

"Deformant"
Ich gebe zu, es ist nicht so ganz offensichtlich, aber das ist die Lösung: Die Tendenz zur Verkleinerung der Flächen durch das rekursive Unterteilen muss korrigiert werden. Nur ist das hier noch nicht so ganz gelungen... |

"Finalist"
...aber hier hat die Korrektur geklappt - und zwar so: Mit den neu berechneten Kontrollpunkten (jeweils mehr als vorher), werden die zu jedem Kontrollpunkt gehörenden (Korrektur-)Punkte auf der zugehörigen Oberfläche bestimmt (diese Korrekturpunkte liegen dann noch weiter "innen"). Nun werden die Konrollpunkte in der entgegengesetzten Richtung um den Betrag der Distanz Kontrollpunkt-zu-Korrekturpunkt verschoben. Eigentlich war's das, aber... |

"Explodiert"
...man könnte ja auch Bezier-Flächen automatisch in Punkt-Gitter umwandeln und auf denen dann den Algorithmus laufen lassen. Warum? Weil man damit die Kanten zwischen einzelnen Bezier-Flächen doch noch beseitigen könnte - *hoff* |
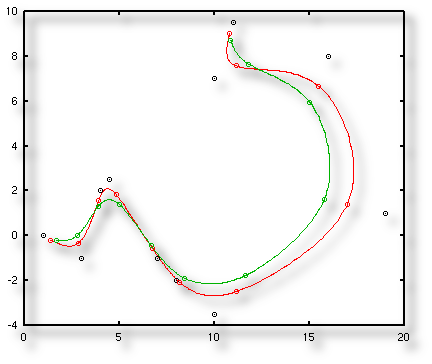
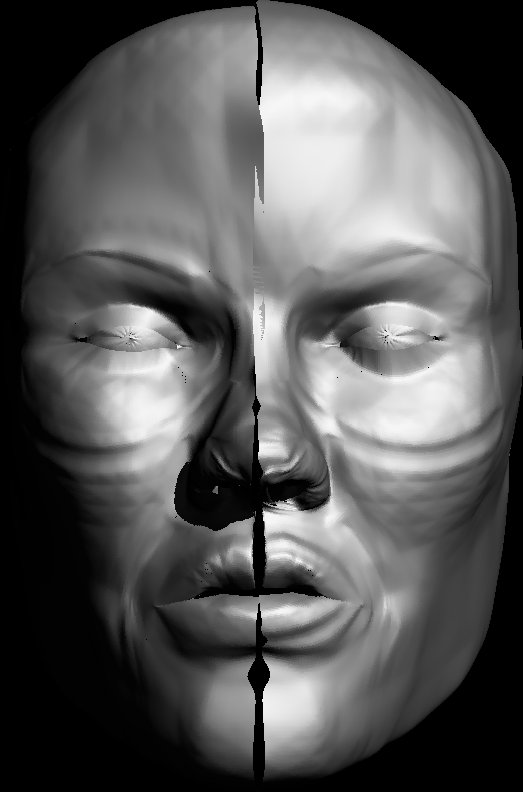
"Bezier2BSpline"
Hat geklappt! Links die Bezierflächen mit deutlich erkennbaren Kanten; rechts die zu Kontrollpunktmatrizen für B-Spline-Flächen konvertierten Flächen, die deutlich glattere Übergänge haben. Allerdings sieht man hier rechts dafür (schwach) die einzelnen Segmente. Dies lässt sich aber noch mit einer besseren Gewichtungsfunktion über die 4x4 zu berücksichtigenden Kontrollpunkte je Segment verbessern. |
|||
| "Deformant" | "Finalist" | "Explodiert" | "Bezier2BSpline" | |||

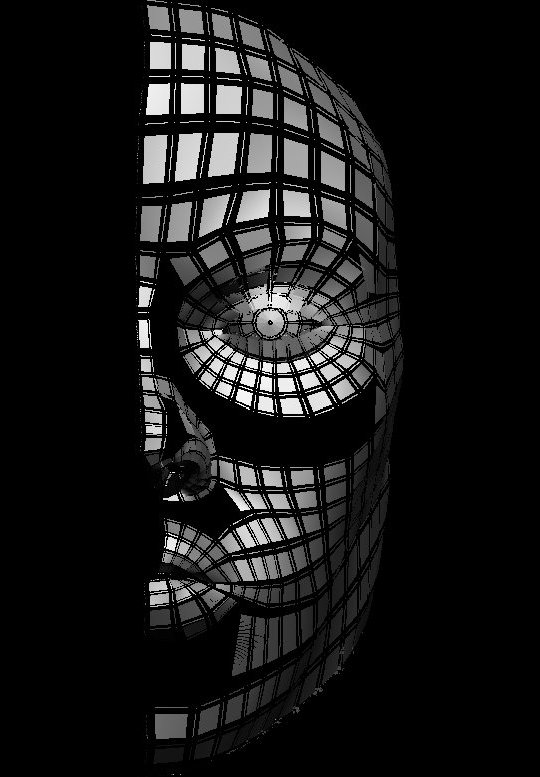
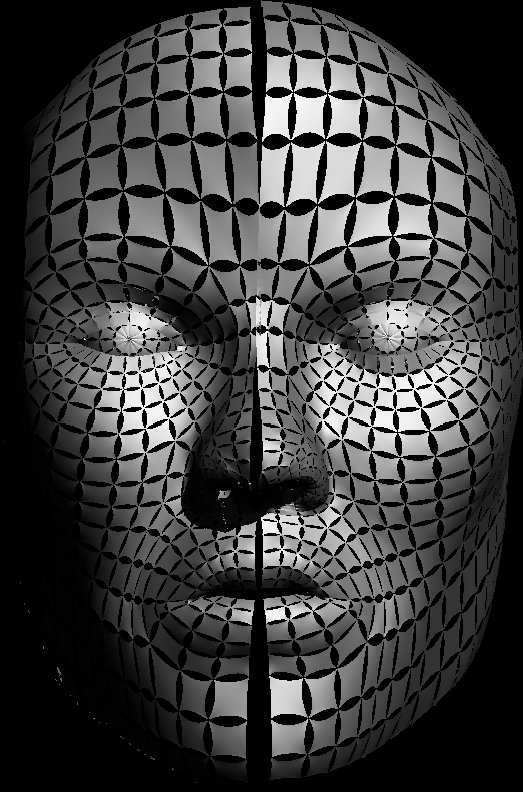
"Eierkopp"
Wie's aussieht hängt natürlich auch davon ab wieviele Kontrollpunkte man je umzuwandelnder Bezier-Fläche berechnet. Hier sind es nur 4 (2x2). Ohne Korrektur der "Irregularitäten sieht's doppelt schlecht aus, aber... |
"Eierkopp mit Sockenschuss"
...aber auch wenn man die Irregularitäten noch weiter verkleinern würde als hier sähe das Ergebnis deutlich anders aus als das Original (zwei Bilder vorher). |
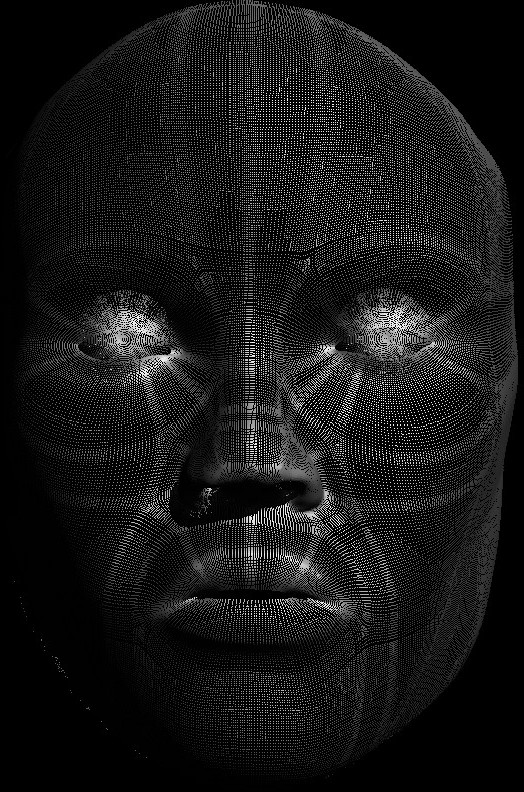
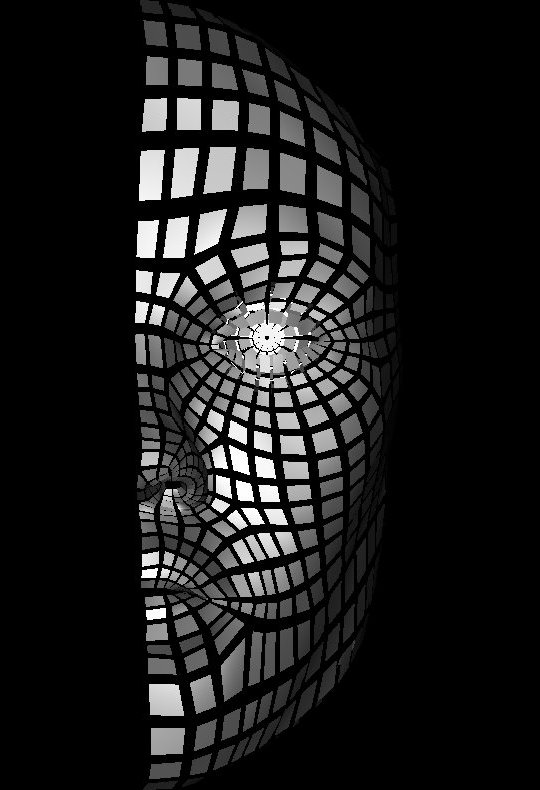
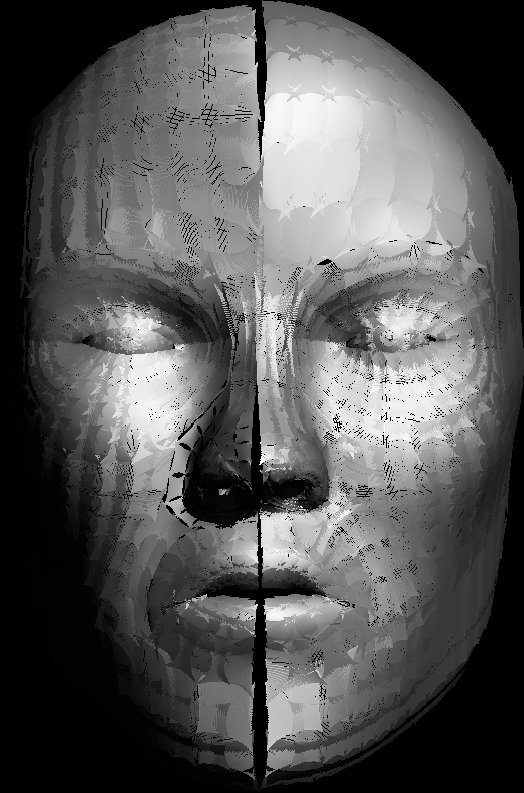
"Fliegengitter"
Kein eigentlicher Fehler, sondern nur mit zu geringer Auflösung berechnet. Man sieht noch einmal sch&oum;n die Bereiche, die automatisch weiter unterteilt wurden, um die "Irregularitäten" zu verschleiern |
||||
| "Eierkopp" | "Eierkopp mit Sockenschuss" | "Fliegengitter" |

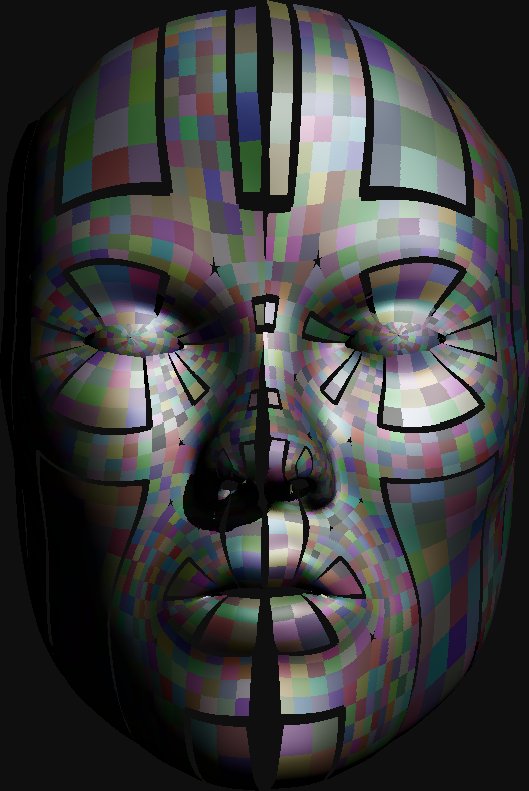
Texturiert
Das Gesichtsmodell ist noch nicht wirklich toll, aber mit Textur sieht's schon ganz brauchbar aus. Kanten sieht man jedenfalls keine mehr - was ja das eigentliche Ziel war... |
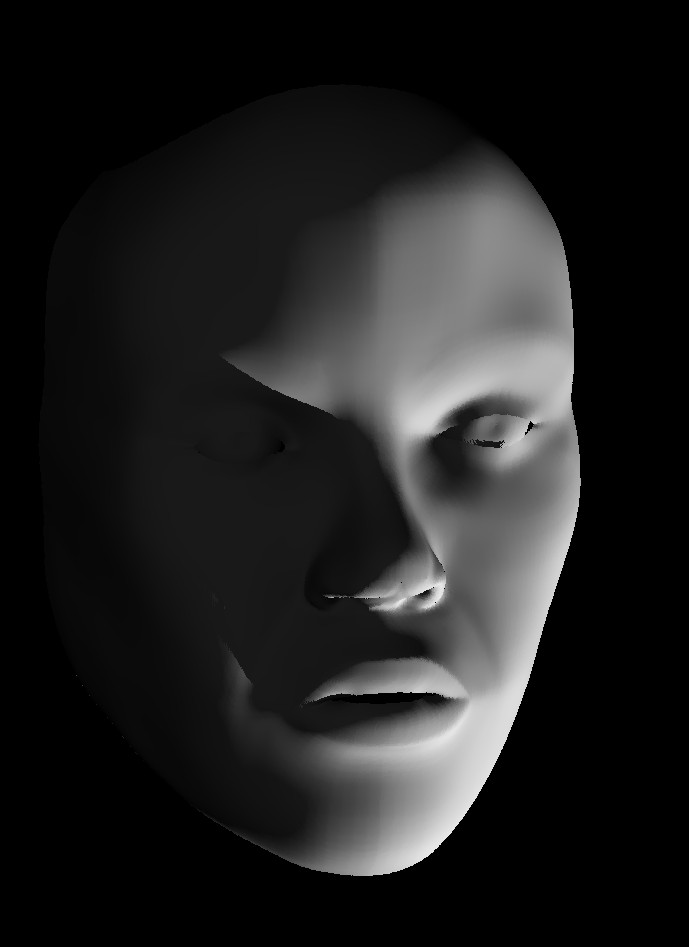
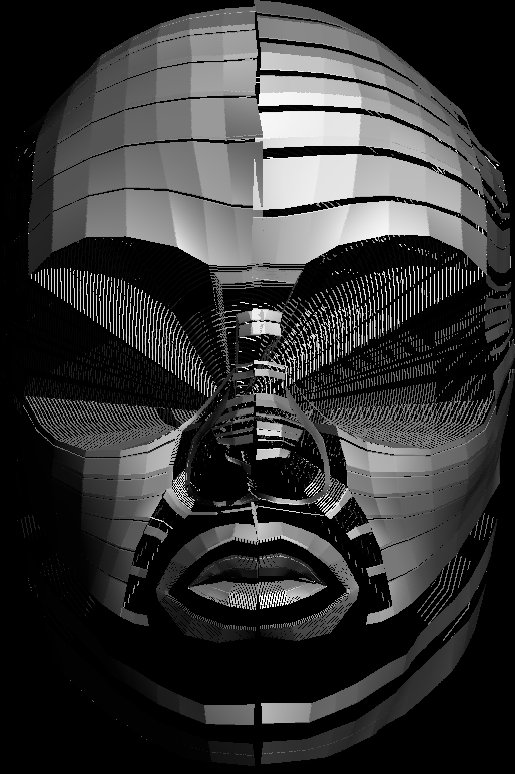
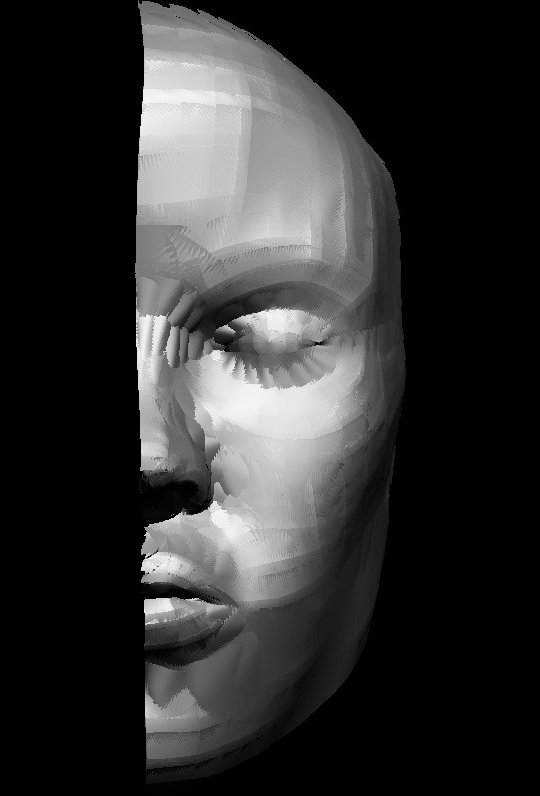
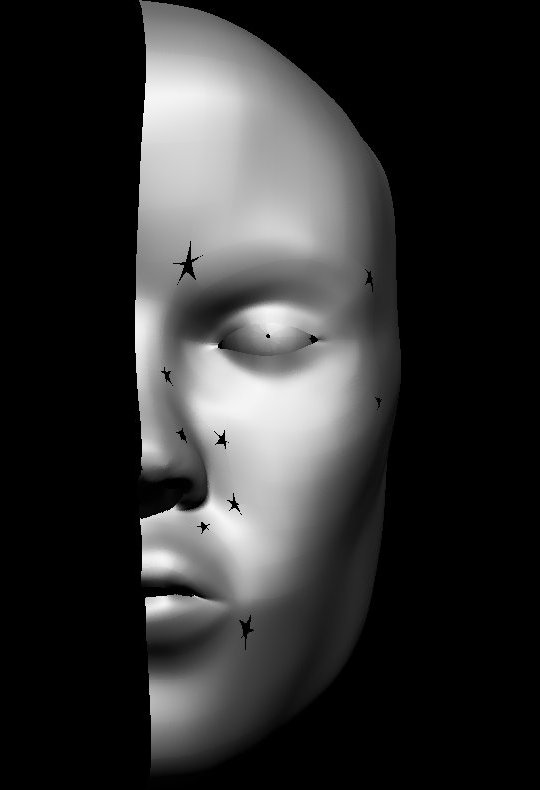
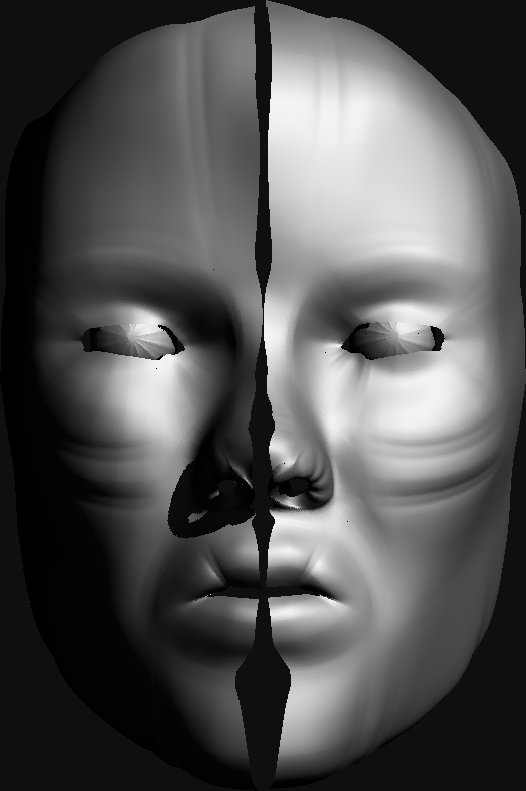
Ohne Texture
Hier nochmal ohne Textur - wie gesagt nicht sooooo doll... |
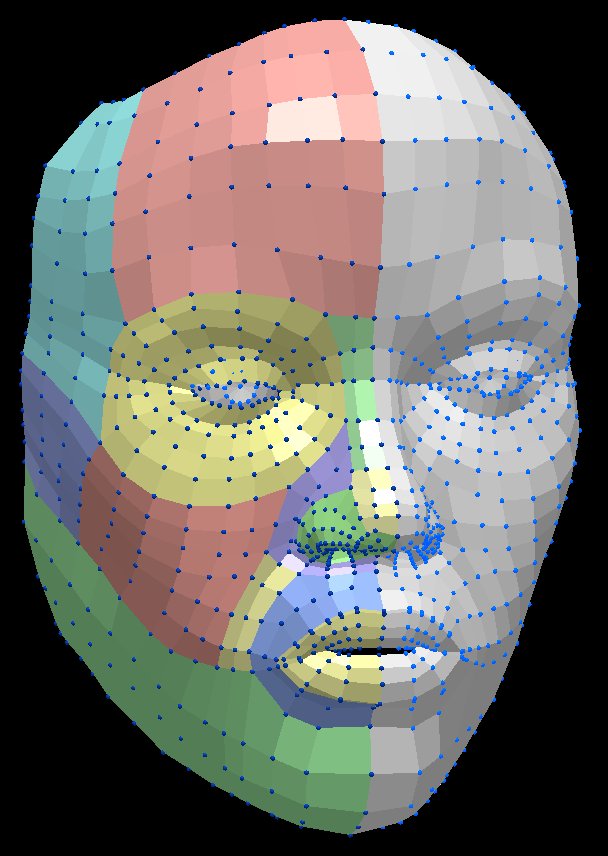
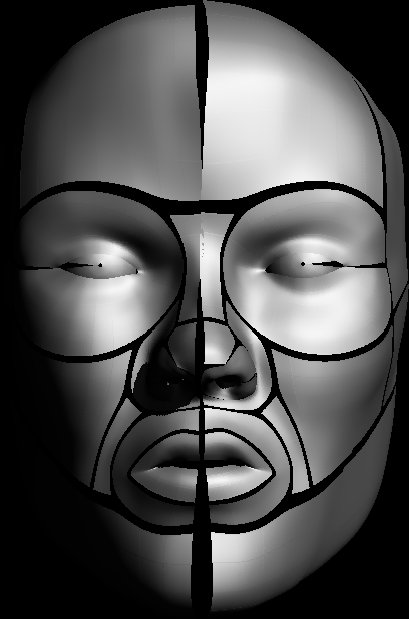
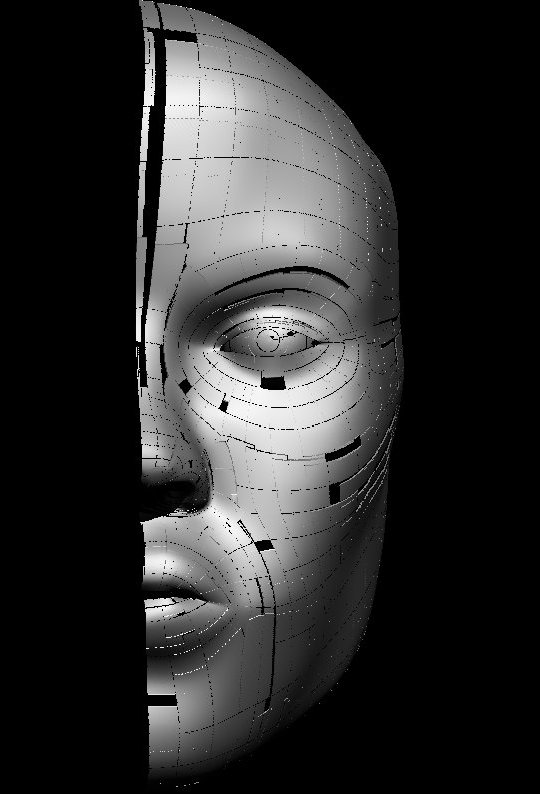
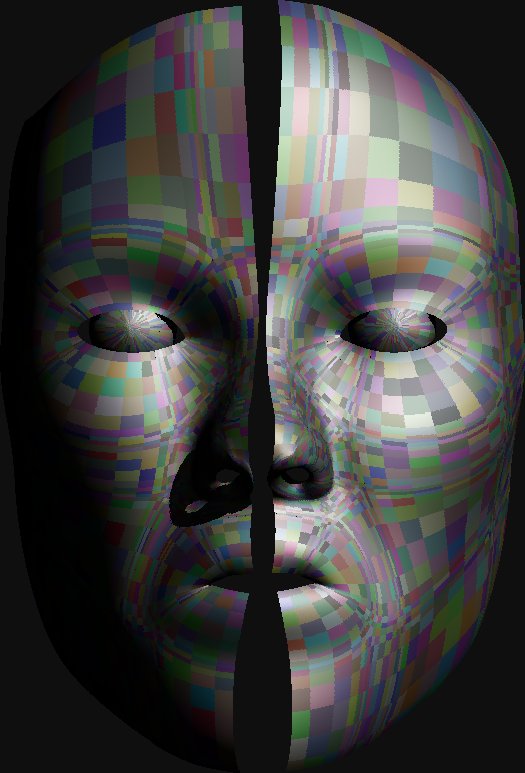
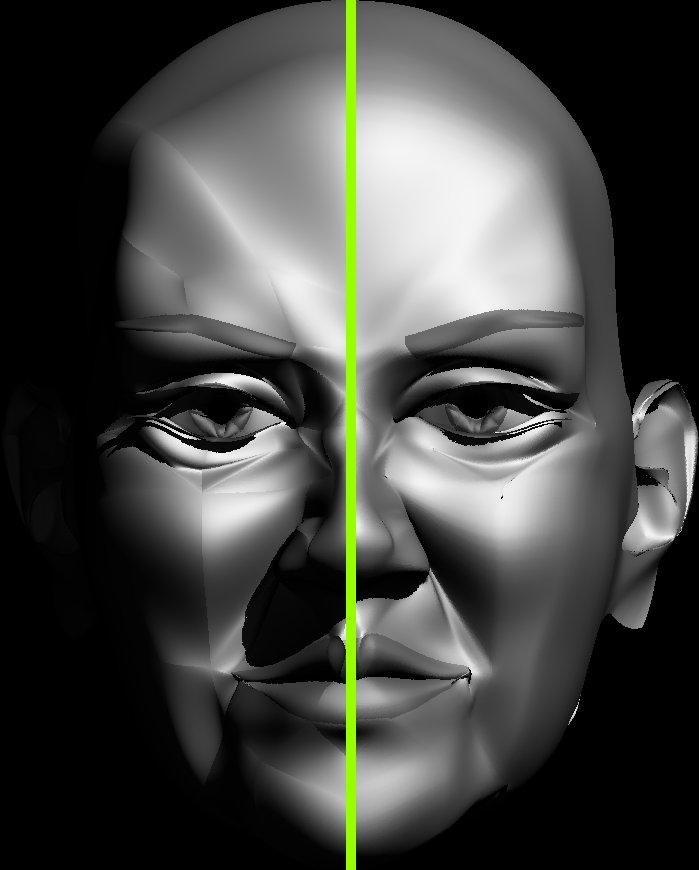
Gesichtsmodell
Das dazugehörige Gesichtsmodell (die Flächen der rechten Gesichtshälfte wurden zur besseren Unterscheidbarkeit unterschiedlich eingefärbt) |
||
| Texturiert |
|
Ohne Textur |
|
Gesichtsmodell |
 .
.